麦萌漫画
16.03MB · 2025-12-09

ros是一款功能强大的机器人操作系统,在使用过程中,配置上网设置是常见需求。以下为您详细介绍快速配置ros上网设置的教程。
硬件连接
首先确保您的ros设备已正确连接到网络。可以通过有线以太网连接或无线wifi连接,根据实际情况选择合适的接口。
有线网络设置
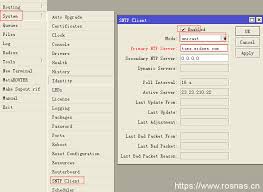
如果是有线连接,打开ros设备的网络配置界面。一般可以通过命令行操作,输入相关命令进入网络配置文件编辑模式。例如,在一些常见的ros发行版中,使用命令“sudo nano /etc/network/interfaces”。在文件中添加网络配置信息,如静态ip地址、子网掩码、网关等。示例如下:
```
auto eth0
iface eth0 inet static
address 192.168.1.100
netmask 255.255.255.0
gateway 192.168.1.1
```
保存并退出编辑,然后重启网络服务使设置生效,如“sudo /etc/init.d/networking restart”。
无线网络设置
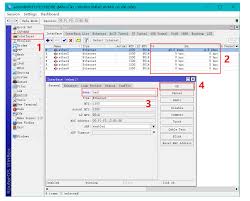
对于无线网络连接,首先扫描可用的wifi热点。使用命令“sudo iwlist wlan0 scan”查看附近的wifi信号。然后编辑网络配置文件“sudo nano /etc/network/interfaces”,添加类似如下内容:
```
auto wlan0
iface wlan0 inet dhcp
wpa-ssid "your_wifi_name"
wpa-psk "your_wifi_password"
```
这里将网络设置为dhcp自动获取ip地址,并填写了wifi名称和密码。保存后重启网络服务。
测试网络连接
配置完成后,使用命令“ping www.baidu.com”测试网络连接。如果能正常ping通,说明上网设置成功。
通过以上步骤,您就能快速为ros设备配置好上网设置,方便其与外界进行通信和数据交互,为后续的机器人开发等工作提供良好的网络基础。

